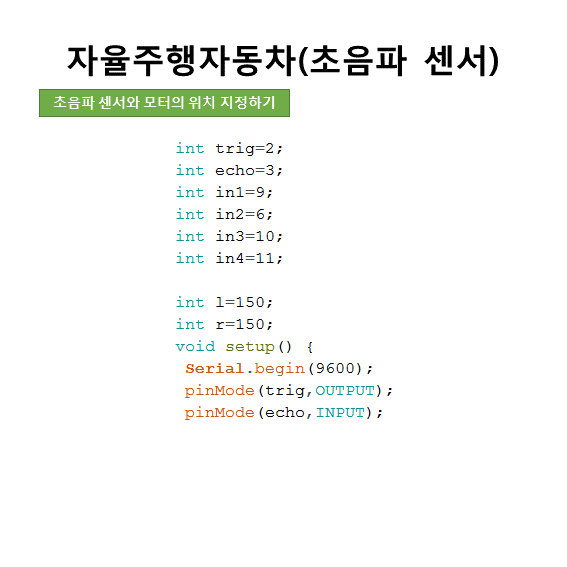
오늘은 초음파 센서로 자율주행차를 만들어보겠습니다
오늘은 초음파 센서를 통해 거리를 측정하는 방법에 대해 수업을 했습니다.
초음파센서에 있는 trig는 초음파를 방출하는 역할을 하고 echo는 trig가 방출한 초음파를 받는 역할을 합니다.

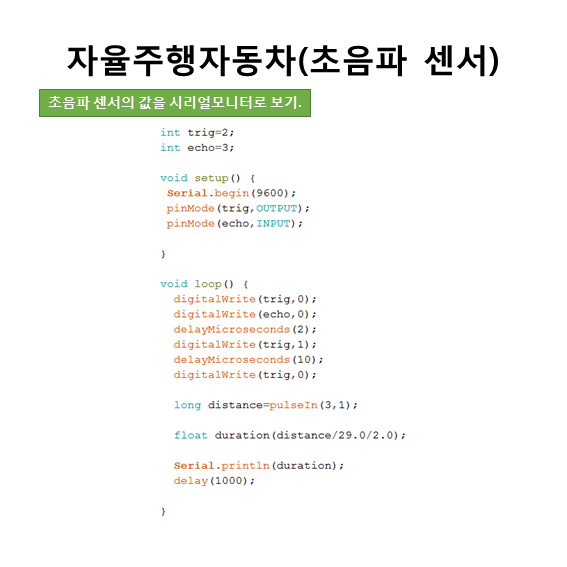
distance는 시간을 측정했습니다.duration은 시간 거리를 계산한 결과입니다.
그래서 durtation을 이용해 거리를 측정하고 장애물을 인식할 수 있습니다.
trig는 초음파를 보내므로 OUT PUT로, echo는 초음파를 받으니까 INPUT입니다.
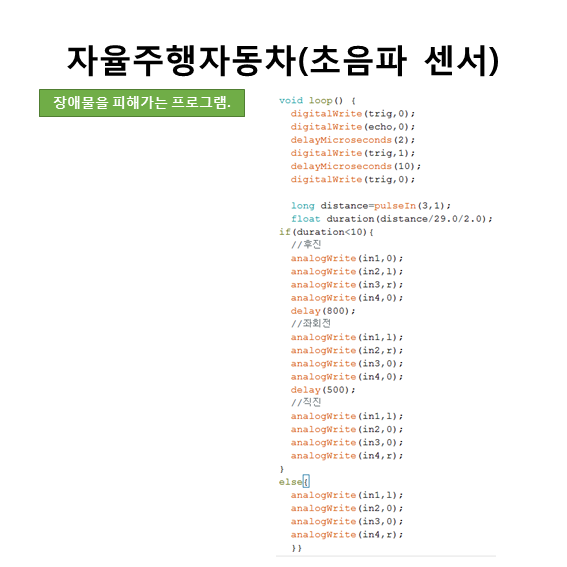
요약 : 만약 장애물이 앞으로 있으면 0.8초간 후진하고 0.5초간 좌회전하여 다시 직진하는 프로그램
Microseconds는 백만분의 일초에요.
공감, 이웃신청, 댓글 달아주세요