적외선 센서(근접 센서)를 이용하여 장애물을 스스로 피하는 자동차를 친구들과 만들어 보았습니다.
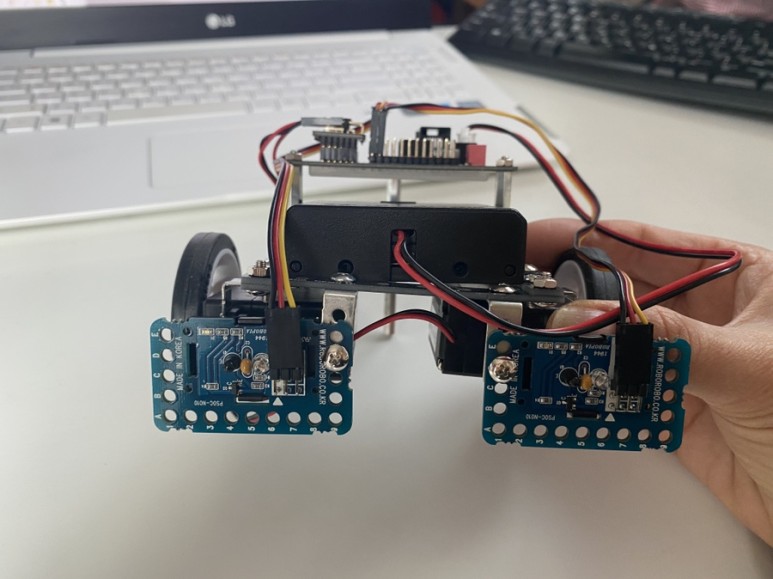
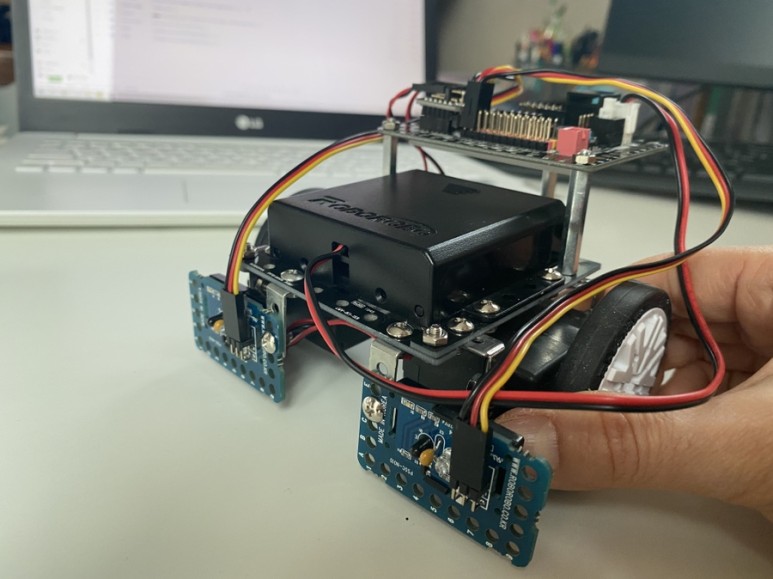
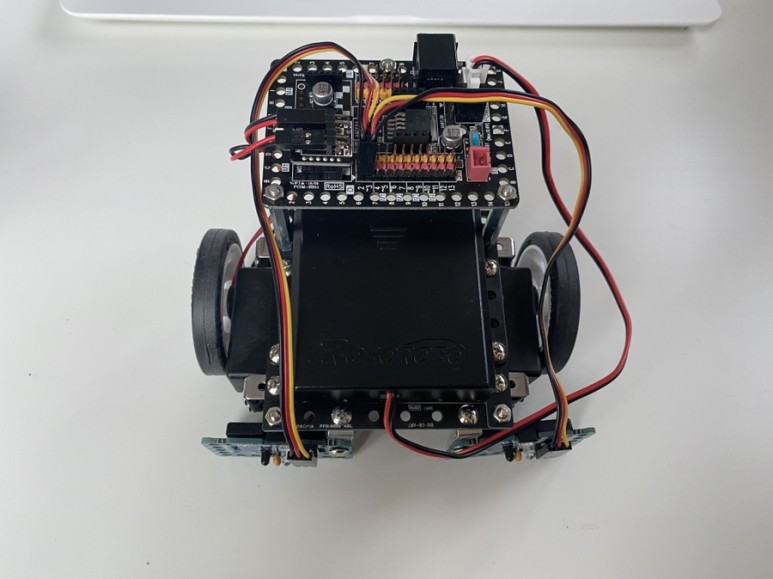
근접센서를 이렇게 아래쪽에 단 이유는…
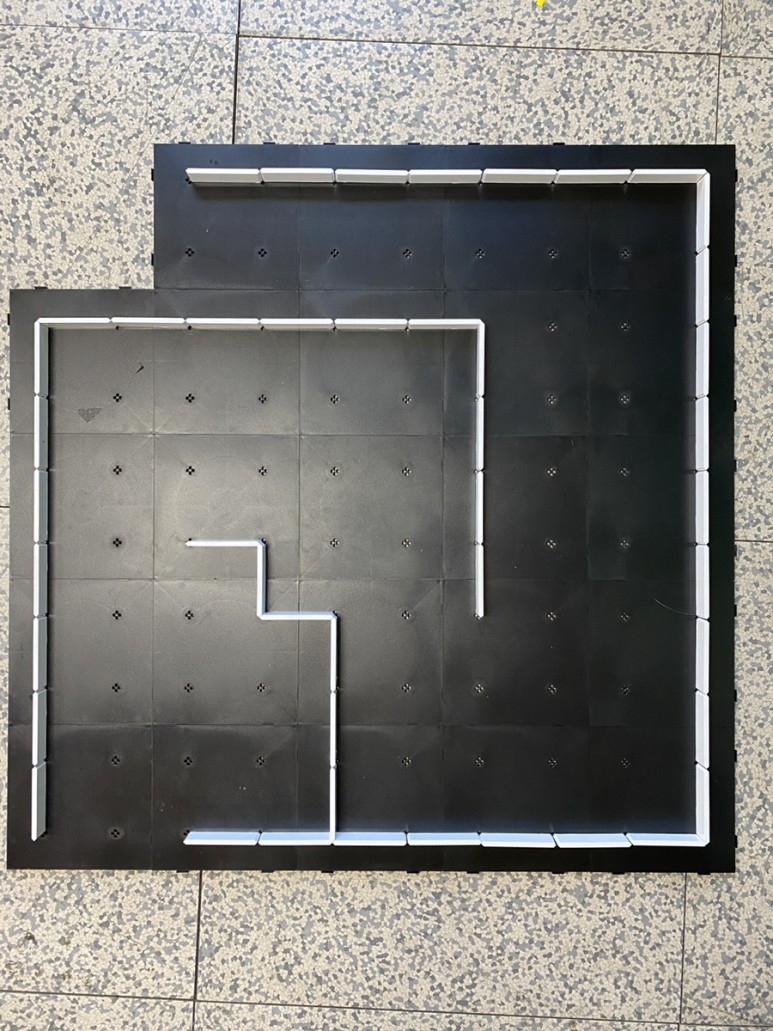
햄스터봇 미로 찾기 판을 써서 미로를 만들었는데 요장애물의 높이가 낮아서 그렇대요
그래서 도중에 차체가 높아지고 센서가 장애물을 인지할 수 없으면 제대로 작동하지 않습니다. ( ´ ; ω ; ` )
사실 목적지를 더 자주 방문한 적도 많은데, 그때마다 영상을 찍지 못해서… 아쉽게도…
너무 쉬운 알고리즘으로 만들었으니까.. 자율주행차라서.. 이름 짓기 민망한데..간단한 코드로 자율주행자동차의 원리를 파악하는데 도움이 되고 싶어요!
연습하기에는 충분하지만.. 다음에 제대로 된 벽에서 시도해보고 싶네요.
이제 마지막 수업을 앞두고 있습니다.아쉽고 보고 싶을 것 같아요한학기 내내 마스크를 쓰고 다녀서 사실 얼굴도 잘 모르겠지만 ㅠㅠ정이 많이 생긴 것 같아요.
언제나처럼 이별이 다가오네요.항상 건강하고 이룰수있는 모든것을 다 이루길 응원합니다!!