차를 소유하고 계신 분들도
TV나 인터넷등을 보면 새로운
차가 나와서 자율주행이 가능하다고.
광고하고 있는 새 차를 볼 수 있습니다.
완벽하진 않아도 정말 차선을 따라서
이동하고 차도 바로 받쳐줍니다.
그리고 앞차의 속도 거리까지 조절을
해 줍니다.

연식이 조금 지난 차라고 해도
크루즈 모드까지는 대부분 지원을
라고 하는 경우를 볼 수 있습니다.
장거리 운전 시 고속도로에서 가속페달을
밟지 않는 것만으로도 얼마나
편안하고 행복감을 주거나 사용해봤다
기사분들이라면 공감하실 겁니다.
저희가 팔을 들 때도 뇌에서 신호를
보내고 여러 과정 끝에 행동으로 옮기고
지듯이 자율주행도 굉장히 복잡하지만
매우 빠른 속도로 판단을 내려야 한다.
안전한 자율주행이 계속될 것이라고
생각합니다.
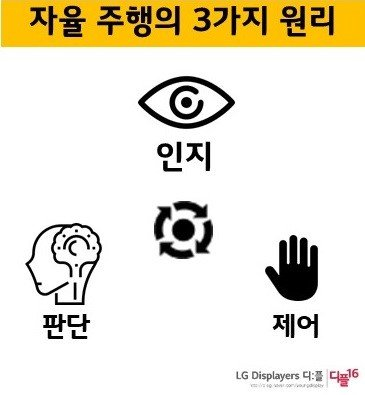
자율주행자동차는 3단계로 구분
첫째: 인지단계 둘째: 판단단계 셋째: 제어단계
가장 중요한 인지 단계
인지를 제대로 못하면 대처 또한
불가능할 수밖에 없어요.
눈에 안 보이는데 어떻게 눈앞에서 날아와.
장애물을 피할 수 있나요?
사람은 빠른 속도로 날아오는 야구공을
본능적으로 피할 수 있다고 하지만
거의 인지하지 않으면 피할 수 없습니다.
이 인지단계는 자율주행에서의 수많은 데이터와
변수를 정리해서 빠르게 도출해야 합니다.
그래야 그에 맞는 판단과 제어를 할 수 있다.
있는데요.
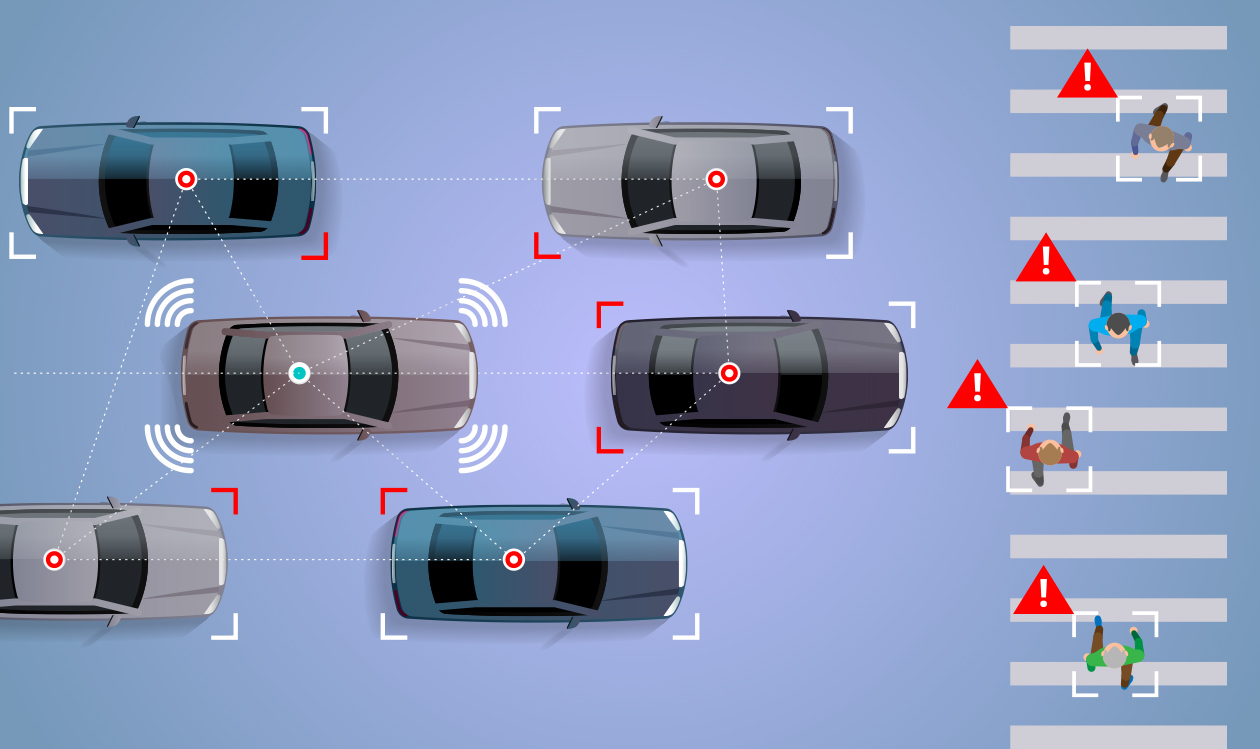
이 단계에서는 자동차의 다양한 센서, 레이더,
GPS 등을 적극적으로 활용하게 됩니다.
우리가 정확하다고 알고 있는 GPS의 경우도
오차가 약 30m까지 날 수 있으니
레이더까지 활용하는 모습을 볼 수 있다.
있습니다.
하지만 이 또한 부족하고 다양한 기술이 개발되었고,
있으며, 그 중 하나가 라이다(LIDAR)
근데 있어요.
인지한 내용을 바탕으로 어떻게 주행하는지
결정하는 단계, 판단 단계.
인지한 내용을 바탕으로 어떻게 주행하면 좋을지
할지 결정을 내리게 됩니다.
소프트웨어라고 할 수 있습니다.
사람은 행동과 학습을 통해 점점 발전하지만,
기계는 하나부터 열까지 다 세팅해야지.
그에 맞게 움직이게 됩니다.
50m 가까이 사람이 있을 때 앞차가
점점 속도를 내고 있을 때 차는 가속을
해야 할지 말아야 할지 판단하는 단계입니다.
결정을 내리면 움직여야겠죠? 제어 단계
어떻게 주행할 것인지, 어떤 주행 방향을
사용할지 정해지면 행동에
옮기는 단계입니다.
가속과 감속은 물론 차량 스티어링을 통해
주행하게 됩니다.
이러한 3단계를 종료하기 직전까지 무한정
반복하는 것이 현재의 자율주행입니다.
인간이 주행하는 것과 같습니다.
길을 보고 도로 상황을 보고 앞차와의 거리가
가까워지지만 거리가 있으면 속도를 줄이는가
조금 있다가 줄이거나 결정을 내리면
그에 맞춰 행동을 반복하고 도착지까지
이동을 하는 것이라고 할 수 있습니다.
세월이 흐르면서 운전자 없이 완전한 자율주행 체제가
가능한 한 많은 사람들이 자동차를 직접 소유하지 않고,
이동이 필요할 때만 사용할 수 있고 주차 등
문제를 좀 더 효율적으로 해결할 수 있다
있지 않을까 싶어요.