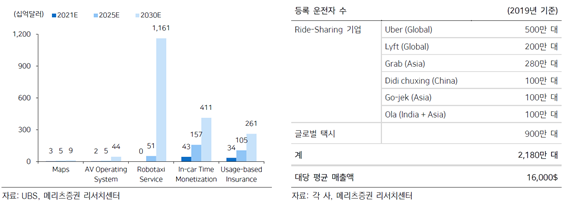
UBS는 2030년까지 자율주행 자동차 관련 소프트웨어 매출 규모가 1조8,850억달러, 로보택시 비즈니스는 1조1,161억달러를 차지할 정도로 급성장할 것으로 내다봤다. 이는 연간 애플 스토어 결제금액(6,430억달러)의 3배에 이르는 거대한 시장이다.
자율주행 기술을 가장 먼저 광범위한 지역에서 구현 가능한 업체가 모바일 생태계인 애플이나 구글 같은 시장의 지위를 차지할 것으로 기대된다.
<2030년 차량용 SW 시장규모 1조 8,850(좌) 현재 모빌리티 서비스를 고려하여 $3,500 잠재시장 형성(우)>
테슬라를 제외한 대부분의 자율주행차 개발업체는 ‘라이더(Lidar)’, 레이더(Radar), 카메라(Camera)를 이용하여 주변 환경을 인식하는 방법으로 자동운전을 개발해 왔으나, 이러한 방법에는 막대한 ‘센싱 장비 비용’과 ‘서비스 지역 확장 비용’이 들어 로보택시 서비스의 상용화가 지연되고 있다.
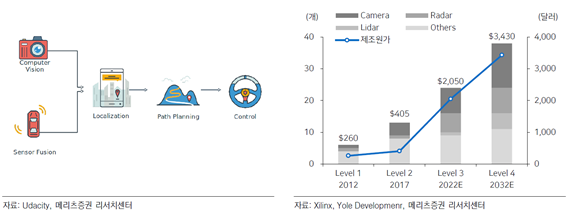
이들 기업의 자율주행 SW가 임무를 수행하는 과정을 보면 다음 4단계로 이뤄진다.
(1) 정밀지도 구축(HD Map Building) 자율주행을 위한 지역의 HD Map(정밀지도)을 사전에 구축하였으며, 이는 도로정보·횡단보도·보도·차선·신호·정지신호 등 주행에 필요한 상세정보를 포함한다.
(2) 인지(Perception) 센서(라이더, 레이더, 카메라)를 이용해, 리얼타임에 인지한 정보를 HD Map와 크로스 체크해, 센티미터(cm) 레벨의 정밀도로 현재 위치를 파악. 동시에 감지한 주변 환경으로 객체 분류(보행자, 자전거, 차량, 공사 상황, 장애물, 신호등, 철도 등 도로의 수많은 물체와 상황 감지)
(3) 예측(Behavior Prediction) 실제 주행 데이터를 기반으로 객체의 움직임 예측 모델에 의해 경로 예측
(4) 계획 및 제어(Planner) 주행 가능 경로 예측, 차량 제어 이동
현재 라이더를 이용한 자율주행 개발업체 중 가장 앞선 곳으로 평가받고 있는 Waymo가 2020년 공개한 5세대 자율주행차 센싱장비(Sensor Suite)는 총 5개의 라이더, 6개의 레이더, 29개의 카메라를 포함하는데 2020년 기준 대당 비용이 $50,000~$100,000에 이른다.
센싱 장비만 해도 보통 자동차 가격을 훨씬 웃돈다. 현재 운행되는 일반 택시의 경우 연간 발생하는 매출액이 평균 $16,000으로 추산되는데, 센싱 장비 비용을 회수하는 데만 약 3년이 걸리는 것이다.
시장에서는 이 같은 기업의 탐사장비 제조원가가 $3,000대로 떨어지는 시점을 2030년 이후로 전망한다.
<라이더 이용 자율주행과정(좌) 자율주행을 위한 센서 개수 및 비용 증가(우)>
비싼 라이더의 비용 이외에도 해결해야 할 문제는, 확실히 「지역적 확장성」의 문제이다. Waymo를 포함해 라이더를 이용해 자율주행을 개발하는 기업의 서비스 지역은 예외 없이 Geofence에 갇혀 있다.
Geofence란 가상의 지역적 경계를 의미하는데, 자율주행으로 이는 “모빌리티 서비스 제공 가능 영역”으로 해석된다.
앞에서 설명한 자율주행 실장 과정에서 ‘1) HD Map Building’은 선결 조건이며, 다음 단계인 ‘2) Perception’을 정확하게 수행하기 위해서는 센티미터(cm) 수준의 정밀도가 필수적이어야 한다.
또한 건설 및 공사 등에서 정보 변화가 수시로 발생하기 때문에 HDMap도 지속 업데이트가 필요하다.
따라서 한번 HD Map을 구축한 후 이를 자율주행이 가능한 최신 상태로 유지하는 데 필요한 비용과 시간이 고려되어야 한다.
로보택시 서비스를 제공하고 싶은 지역의 모든 도로(미국에서는 418만 마일)를 매핑하고 있어, 필요에 따라 데이터 손실을 없애는 일 없이 저비용으로 계속 업데이트가 요구된다.
이를 위한 관련기업의 전통적인 접근방법은 Mapping을 위한 센서를 장비한 차량을 필요한 지역에 배치하여 정밀지도를 구축해 나가는 방법이다.
글로벌 1위 HD Mapping 업체인 Here Technologies의 대당 센서 하드웨어 가격만 최소 20만달러에 달하기 때문에 이러한 고성능 센서를 갖춘 차량을 주요 국가 전역에 배치해 실시간으로 데이터를 수집하는 것은 불가능에 가깝다.
이에 전통적인 HD메이킹 접속도로를 주행하는 완성차 업체의 차량에 센서를 장착해 도로 및 주변상황 정보를 HD 메이플 클라우드에 전송하는 방식의 클라우드 소싱(Crowd sourcing)을 활용하는 효율적인 방법이 제안됐다.
인텔의 자회사인 ADAS/자율주행기업 모빌아이(Mobileye)는 효율적인 Mapping을 위해 다른 시각에서 접근한다.
현재의 AI 레벨에서는, 자동 주행에 필요한 정보(도로의 정보·횡단 보도·보도·차선·신호·정지 신호등 )를 주행중에 수집 분류할 수 없기 때문에 HD Map이 필요하지만, 실질적으로 필요한 것은 HD Map 그 자체가 아니고, 해당 정보이다.
따라서 HD Map 전체를 구축하는 것보다 필수적인 정보만 Mapping하며, 이를 위한 차량은 완성차 소비자가 운행 중인 차량에 ADAS 센싱 장비를 이용하면 지역적 확장성과 실시간 업데이트를 모두 충족시킬 수 있다.
Mobileye는 ADAS 시장점유율 1위인 점을 이용하여 현재 보급된 ADAS 센서를 통해 자율주행에 필요한 정보를 수집하고 이를 Mobileye Roadbook이라고 하는 클라우드에 업로드하여 데이터베이스를 구축, 라이더를 이용하여 자율주행을 개발하는 업체에 제공하는 비즈니스 모델이다.
현재, Mobileye는 자사 제품을 사용하는 27사의 OEM의 차량으로부터 매일 800만킬로 주행에 해당하는 데이터가 수집되고 있어 75억킬로 주행에 해당하는 데이터를 확보했다고 발표했다.
또, 「24년까지 매일 10억 km 주행에 상당하는 데이터 수집을 목표로 설정했다. 컨셉만 생각하면 테슬라처럼 최종사용자가 데이터 공급자가 되는 선순환 구조여서 라이더 자율주행 상용화에도 희망이 있어 보이지만 아래와 같은 이유로 쉽지 않을 것으로 전망한다.
현재의 ADAS 기기만으로 수집할 수 있는 정보에는 한계가 있어, 실제로 모빌 아이가 공개한 데이터에 의하면, km당 수집하는 데이터의 용량은 10 kb에 지나지 않는다.
캘리포니아 교통국(DMV)이 최근 발표한 자료에 따르면 HD Map을 이용해 시험 주행한 Waymo 차량조차 Miles/Disengagement(운전자 개입 없이 자율주행차가 갈 수 있는 거리)는 30,000mile에 불과하다.
이는 시속 10miles의 속도로 3000대의 로보택시를 운행할 경우 1시간에 한 번씩 사고가 날 수 있다는 의미로 로보택시 비즈니스를 운영하기 어렵다는 것을 보여준다.
이와 같이, 한정된 지역에서 정밀한 HD Map을 이용한 환경조차 충분한 안정성을 나타내지 못하고, 광역 HD Mapping이 현실적으로 곤란하기 때문에, 지역적인 서비스 확장도 곤란한 상황이다.
따라서 이들 업체의 자율주행 개발 과정에서는 센싱 장비(라이더, 레이더, 카메라) 비용 절감에 더해 HD mapping 비용과 지역적 확장성까지 고려해야 로보택시 비즈니스의 가능성에 대한 올바른 진단이 내려질 것으로 판단한다.
현재로서는 이들 기업이 1~2년 안에 세계 어디서나 자율주행이 가능한 로보택시 서비스를 시작하는 것보다 점차 서비스 가능 지역을 확대해 나가는 방향이 예상된다.
[참고자료] 라이더 자율주행의 회색전망 메리츠증권 2021.8